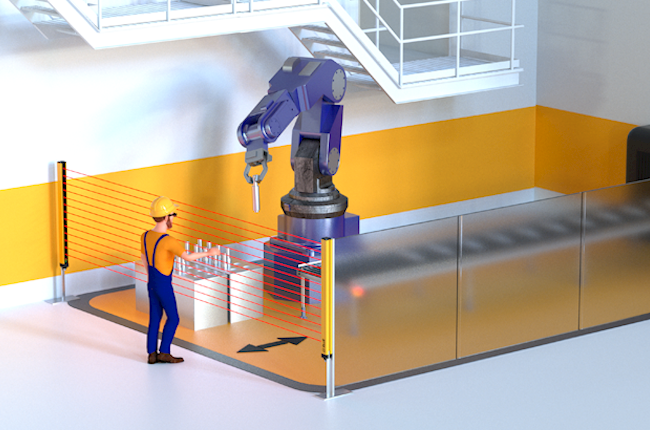
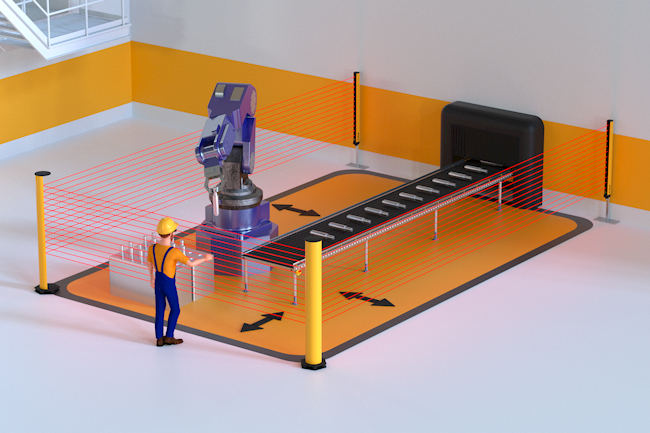
L’efficacia della protezione dipende fortemente dal corretto posizionamento della barriera rispetto al pericolo.
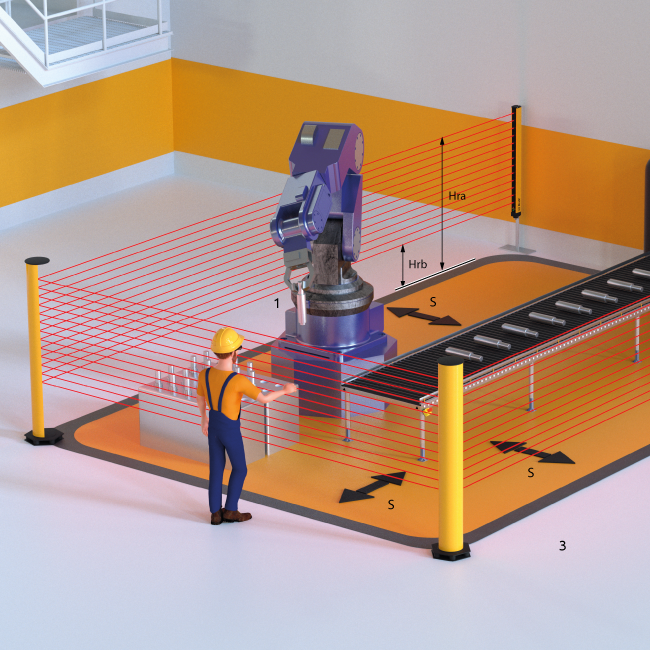
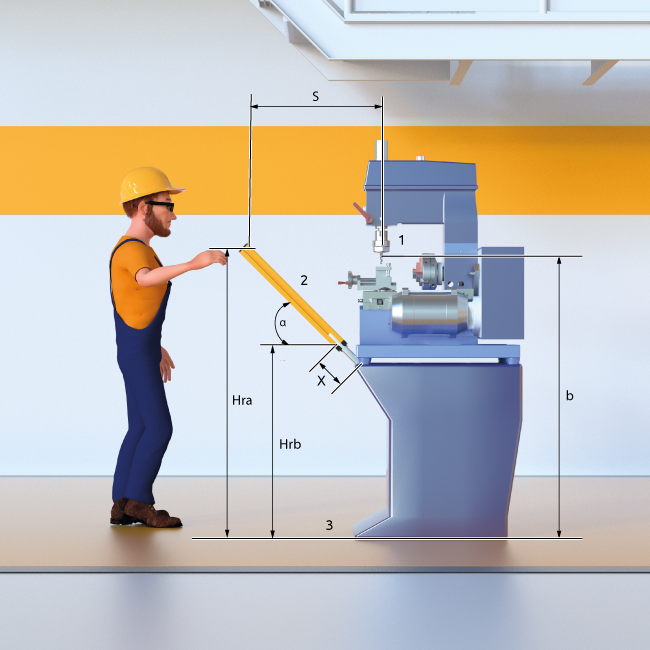
La barriera deve essere posizionata ad una distanza maggiore o uguale alla minima distanza di sicurezza S, in modo che il raggiungimento del punto pericoloso sia possibile solo dopo l’arresto dell’azione pericolosa della macchina.
Il posizionamento deve essere tale da:
- Impedire il raggiungimento del punto pericoloso senza attraversare la zona
controllata dalla barriera - Non consentire la presenza di una persona nella zona pericolosa senza che essa sia rilevata. Per questo caso potrebbe essere necessario ricorrere a dispositivi di sicurezza aggiuntivi (es.: barriere fotoelettriche orizzontali)
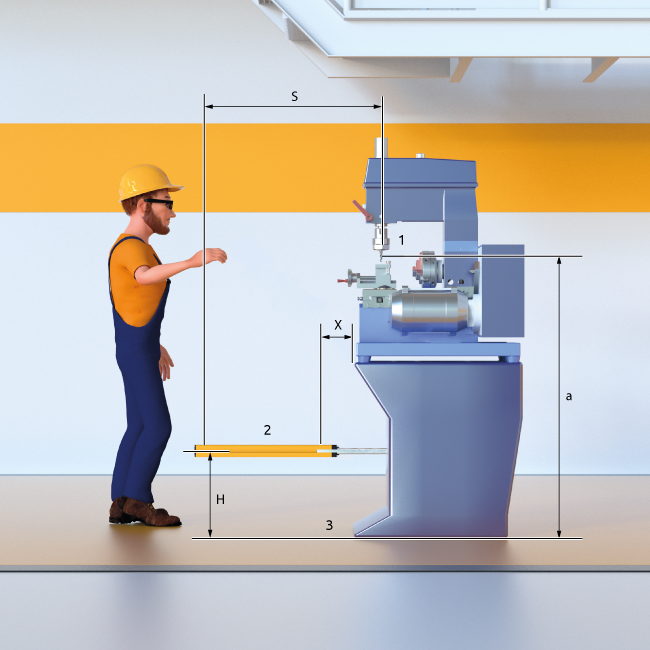
La Norma ISO 13855 fornisce gli elementi per il calcolo della distanza di
sicurezza.
Se la macchina considerata è soggetta ad una norma specifica di tipo C è
necessario fare riferimento a tale norma.
Se la distanza S calcolata risulta eccessiva è necessario:
- ridurre il tempo totale di arresto della macchina
- migliorare la risoluzione della barriera